PiPER-X
PiPER-X from AgileX Robotics





Description

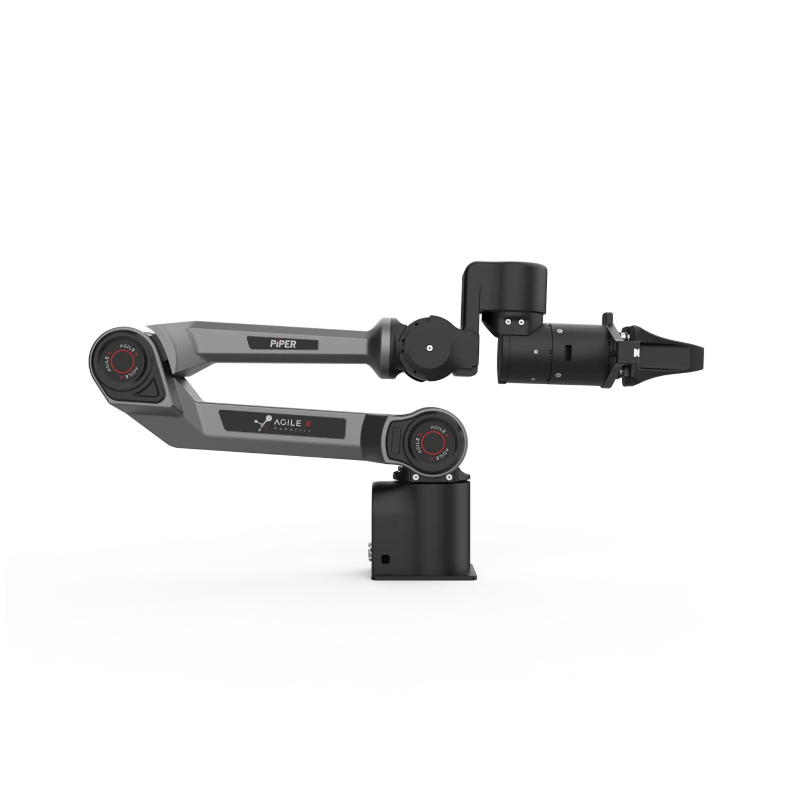
PiPER-X
A 6-DoF research arm with an agile wrist and open interfaces—built for embodied manipulation and fast integration.
1.5 KG |
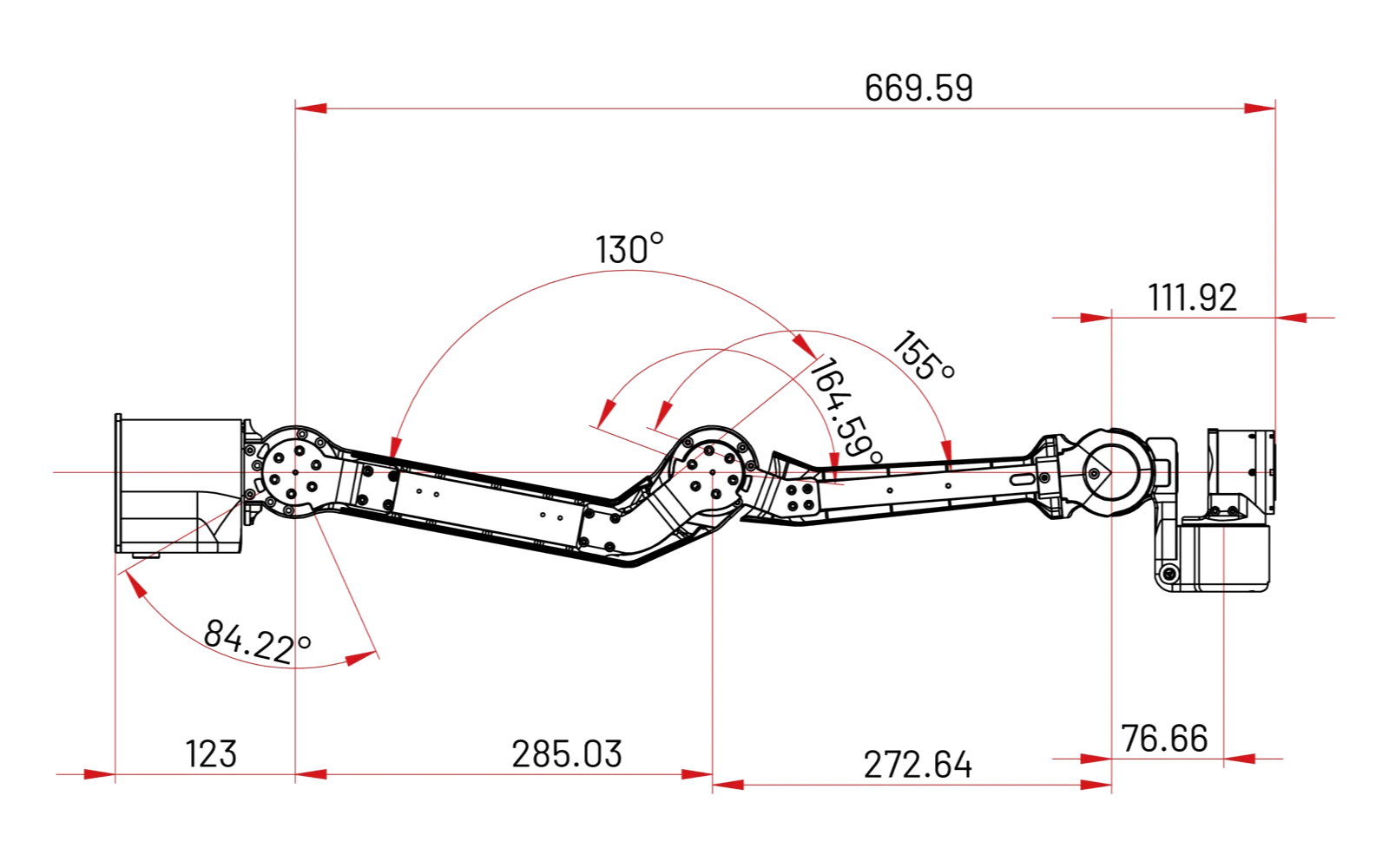
669 MM |
0.1 MM |
Playload |
Reach |
Repeatability |
Precision Motion, Repeatable ResultsPiPER-X delivers smooth, controlled motion for repeatable manipulation tasks. Built for consistent trajectories and reliable positioning across cycles—ideal for research experiments and benchmarking.
|
 |
|
|
Host Software Teaching, Easy ReplayTeach motions through the host software with a clear, guided workflow. Record key poses or trajectories and replay them consistently—making manipulation experiments faster to build and easier to reproduce.
|
ROS/SDK Control, Developer-ReadyControl PiPER-X through ROS workflows or the SDK/API for custom development. Build your own pipelines—from motion commands to task scripts—so you can prototype faster and iterate with confidence.
|
 |
|
|
Agile Wrist, Flexible MotionThe agile wrist enables rapid orientation changes and multi-angle manipulation—ideal for insertion, alignment, and tight-space tasks.
|

|
SPECIFICATIONS |
|
||
|
DOF |
6 |
MATERIAL |
ALUMINIUM ALLOY BODY & PLASTIC HOUSING |
|
PAYLOAD |
1.5KG | CONTROLLER | INTEGRATED |
|
WEIGHT |
4.5KG | COMMUNICATION | CAN |
|
REPEATIBILITY |
±0.1MM | PROGRAMMING | DRAG TEACHING/OFFLINE TRAJECTORY/API/PC |
|
REACH |
669.59MM | EXTERNAL INTERFACE | POWER*1,CAN*1 |
|
INPUT VOLTAGE |
DC24V | BASE INSTALLATION DIMENTIONS | 70MM*70MM*M5*4 |





")
")
")
{kind=link}
{kind=link}
{kind=link}
{kind=link}